When you work with microcontrollers, you tend to accumulate all sorts of development boards that get used a few times and tossed in a pile in some drawer. It seems so wasteful to just leave them sitting there, so I decided I should start a summer project to put a few to work.
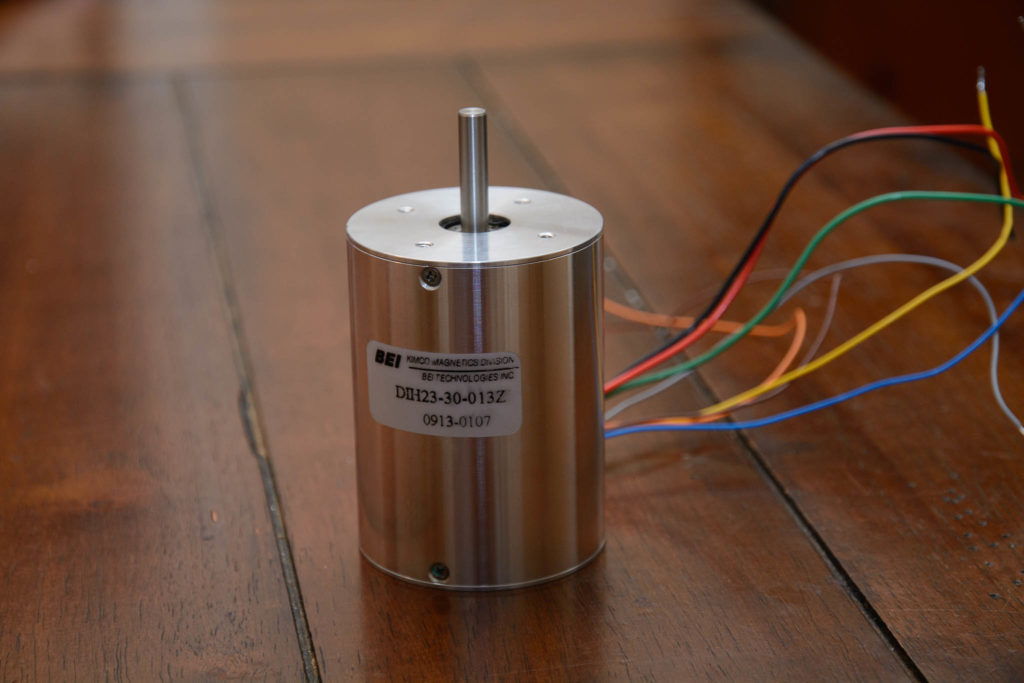
Once I found an amazing deal on a small very high quality BLDC motor, I knew exactly what I needed to make: a motorized skateboard.
I pulled out the quite nice TI TMS320F28069 Launchpad, grabbed a DRV8323RS Boosterpack, a MSP430 Launchpad from my pile (they were $4.30 a few years ago!), and stole some old C110L boosterpacks from another project. The idea is to use the TMS320F28069 and DRV8323 to spin the motor and the MSP430 as the wireless remote.
The TMS320F28069M has TI’s proprietary InstaSPIN code embedded in some ROM, but that is no fun. I am going to evaluate a few different methods of controlling the motor and see what works best – if this motor even has enough torque or if the DRV8323 boosterpack’s 20A peak current is enough to get me and the skateboard moving.
If I like the way it performs, I might even design a custom board for it and use it to get around town.
The first problem to solve is how to attach the motor to the skateboard and wheels … we will figure that out in part 2.